RF [Radio Frequency] Energy Harvesting
15 Apr 2013[Update 5/3] We were able to get an led to light up for a few seconds and a teensy microcontroller run for a few cycles. Head over here for more information: http://gremsi.com/projects/rfenergy
In my CS 3651 Prototyping Intelligent Appliances class, a team of 3 students (including me) are working on energy harvesting with radio frequencies.
This project description was written by the whole team.
We are constructing a device that takes in radio waves and powers a sensor or stores that energy in a battery.


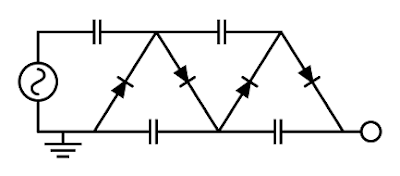
An alternative design is to use a Cockroft-Walton voltage multiplier, which takes in AC and converts it to DC while also multiplying the voltage.
[Update 4/15]
I found these videos to be a good starting point (this is part 1/3): http://www.youtube.com/watch?v=_Fuw2V0COEY. We were able to get successful results for harvesting energy with am radio waves.
We have tried a Cockcroft-Walton voltage multiplier but for some reason the voltage in the capacitors is increasing even when there is no antenna attached. I believe it the circuit it self could be acting as an antennae but not entirely sure.
In my CS 3651 Prototyping Intelligent Appliances class, a team of 3 students (including me) are working on energy harvesting with radio frequencies.
This project description was written by the whole team.
We are constructing a device that takes in radio waves and powers a sensor or stores that energy in a battery.
Free energy is always around us in many forms. One of the forms we don't hear about so much is energy from ambient waves such as television or radio. We're interesting in trying to tap that source of power on a small scale and seeing what we can do with it.

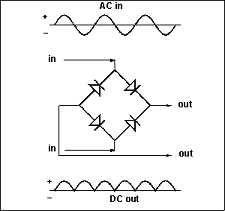
We will be using an antenna to harvest radio signals, and a charge pump design (combining a full-wave rectifier and a voltage multiplier) to charge the energy storage. That will be used to power an attached device.
The charge pump can be designed in multiple ways. In the first design, it will consist of a full-wave rectifier and a Dickson voltage multiplier.

An alternative design is to use a Cockroft-Walton voltage multiplier, which takes in AC and converts it to DC while also multiplying the voltage.

I found these videos to be a good starting point (this is part 1/3): http://www.youtube.com/watch?v=_Fuw2V0COEY. We were able to get successful results for harvesting energy with am radio waves.
We have tried a Cockcroft-Walton voltage multiplier but for some reason the voltage in the capacitors is increasing even when there is no antenna attached. I believe it the circuit it self could be acting as an antennae but not entirely sure.
Millard Hiner
2013-11-28T13:54:49.938Z
I found your website perfect for my needs. Thanks for sharing the great ideas. Whole article is too good and well written.